JAVIER REYNA
Happy. Engineer. Designer.
Development and Analysis of the Linkage System

Figure 1: Freeze-frame analysis of a blackbird
We reviewed studies by Abourachid and Provini on bird’s gait, as well as side view videos of a blackbird walking, to inform our design decision. as the basis for our design decisions. We used freeze-frame and slow-motion videos analyze the walking motion of a bird. Figure 1 shows a freeze frame analysis of a blackbird’s gait. We then identified the key points in the bird’s gait to replicate in our bird-walker design.
Our linkage is based on the Hoeken linearization 4-bar mechanism, commonly used to mimic the gait of animals in dioramas. We added a 4-bar parallelogram “reverser and amplifier” to the end of this linkage to get a mirrored as well as amplified coupler point trajectory. This design eventually turned into a leg that looked very similar to a bird’s. Although it was possible to not use extra linkages for the foot, the easiest way for the bird-walker to be balanced on one foot was the have the foot parallel to the body at all times - to accomplish this, we added two extra four bar “parallelizing” linkages to keep the feet parallel to the body. These extra linkages can be seen in Figure 2 as the trajectory of the two coupler points mimics each other, offset by a constant vector.
Once we settled on a potential design, I modeled the coupler curve for the feet in Matlab and proceeded to calculate and update our model to provide position, velocity, acceleration, and force plots.

Figure 2: Initial linkage design for mimicking the gait of a blackbird

Figure 3: A Motion Genesis model of the bird-walker’s gait, where we demonstrate the middle joint’s nearly parallel to the ground motion through a full stepping cycle.

Figure 4: The coupler curve for the bird’s feet placement relative to the ground
Prototyping and Designing for Manufacturing

Figure 5: CAD of the 12-bar linkage being tested in a motion study

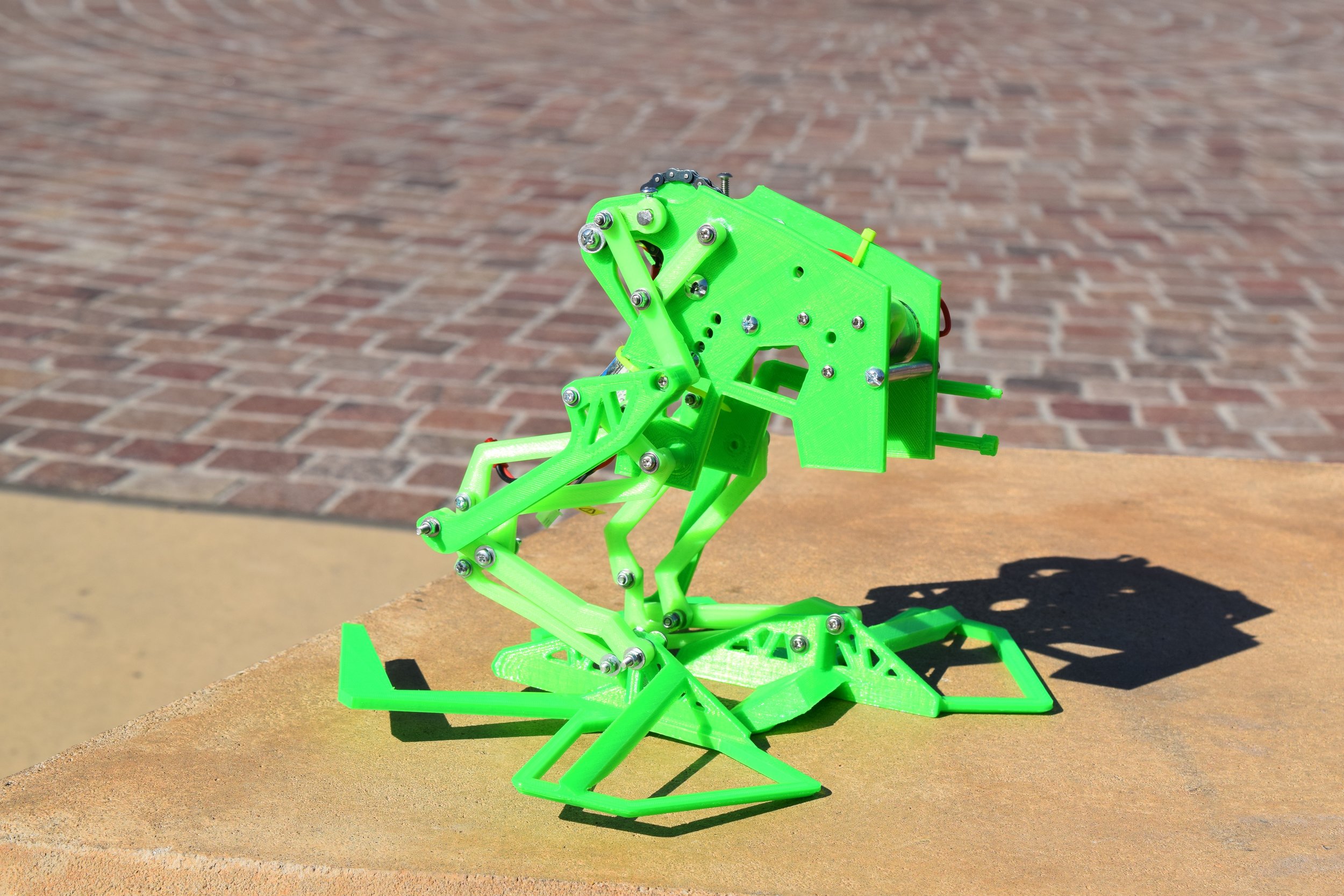
Figure 6: The fully functional and 3D printed model
Once the linkage system achieved the desired coupler curve and the basic linkage could walk in our Motion Genesis simulation, we created a SolidWorks model that we would use to manufacture our prototypes and final design. This allowed for a full assembly test of potential interference between parts and a motion study. If the model did not walk within a simulation, then it would not walk in real life. If it did walk in the simulation, then it had a chance in real life.
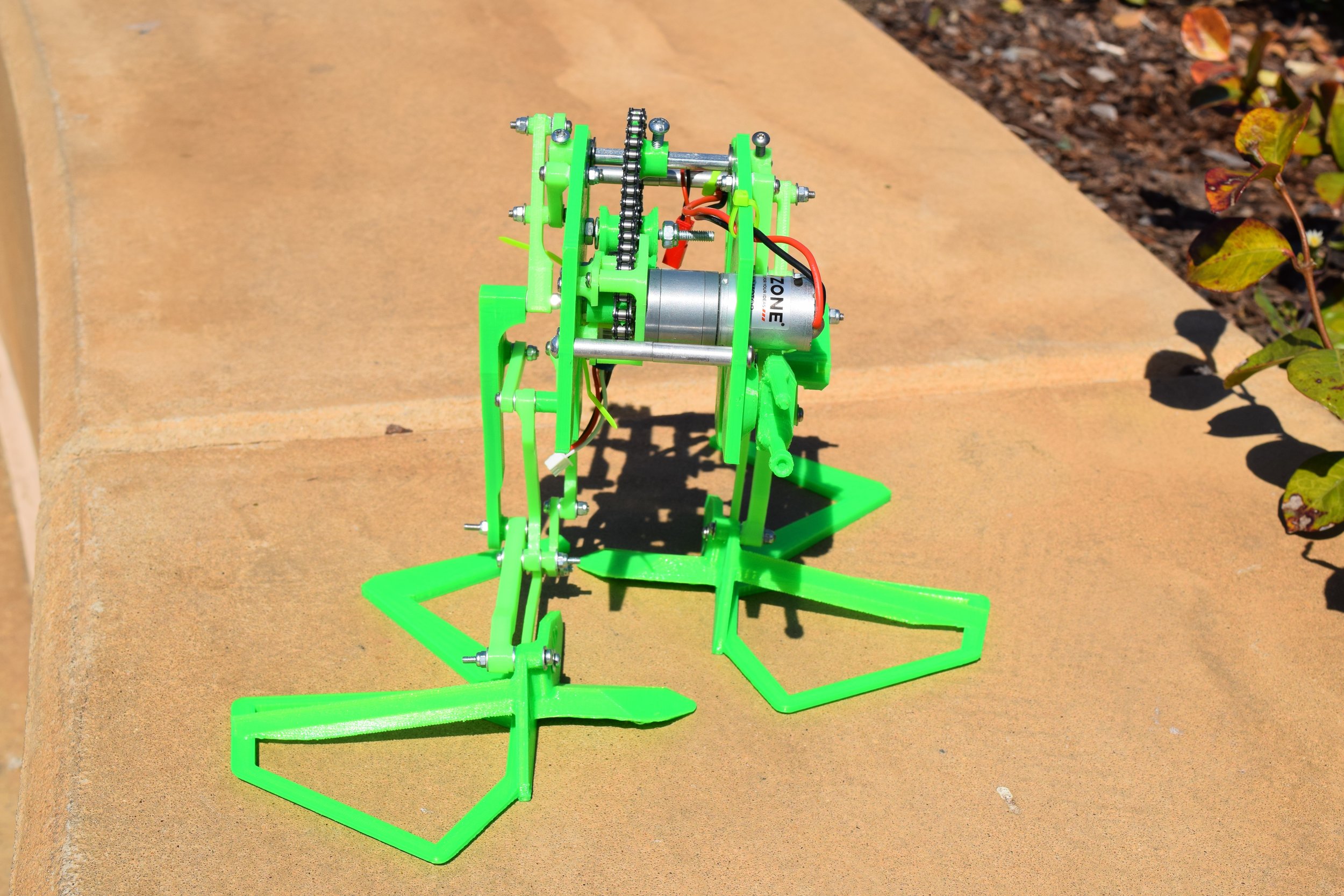
Figure 7: The front view of the walker

Figure 8: A top view of the walker
Final product in its natural habitat…
