JAVIER REYNA
Happy. Engineer. Designer.
"CRII" Mobile Base Robot
The autonomously orienting, driving, and chip depositing robot

Click "Full Project Website" to see eagle schematics, mechanical design and hardware, code for the project, and a more in-depth description of the task.

Quick Overview
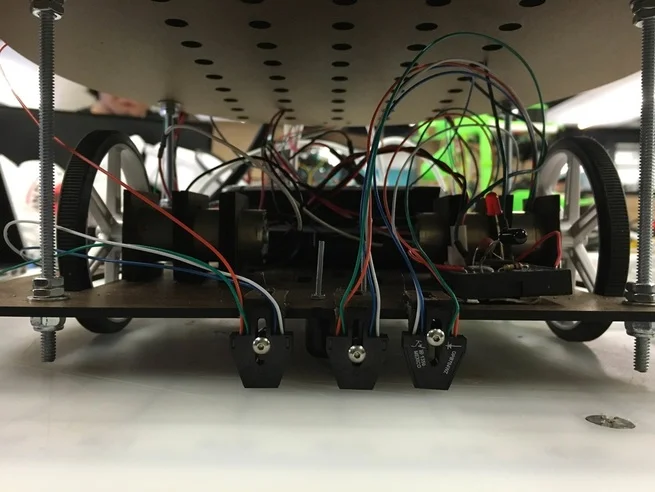
In a team of four with Emily Cao, Matt Induni, and Michael Raitor, we created an autonomous mobile base robot that could line sense, detect specific IR signals, drive, and dispense poker chips. Its logic functioned based on state machines.
The objective of the project was to design and create a robot that could read a variety of sensor inputs to find its way to five poker chip deposit bins and deposit as many chips as possible. Once a load has been deposited, the robot had to station itself inside a black-taped square to reload chips and then return to deposit the new load into the see-saw bins. Meanwhile, another robot on the other side is attempting the same task in order to tilt the bins to its favor.

Strategy:
1. Orient the robot by using IR sensors to seek the beacons under each deposit bin.
2. Drive to intersect with the black tape lines and begin line following.
3. Dump tokens into the three center see-saws using the servo powered arms.
4. Use line sensing to continuously drive back and for along the center line, meanwhile reloading and depositing chips.